

文档简介:



简介
本文将为新手提供一个快速测试和集成EasyDL & EasyEdge的 Linux Arm SDK的图文教程。
测试前的准备
-
Linux ARM的硬件及开发环境
- 详情参考下方文档
-
EasyDL平台的Linux ARM SDK
- 以图像分类为例,前往操作台训练模型后,选择发布为Linux ARM的通用设备端SDK,发布成功后即可从平台下载
-
用于激活通用设备端SDK的序列号
- 前往控制台申请用于激活通用设备端SDK的序列号
- 首次使用SDK或者更换序列号、更换设备时,需要联网激活。激活成功之后,有效期内可离线使用
效果展示
环境准备
硬件环境
本SDK适用于Linux Arm操作系统,如
- ubuntu、centos等
- 树莓派Raspbian
- ...
且适用于aarch64和armv7hf的CPU架构。
用户使用以上系统和架构的硬件(如RK3399开发板、树莓派4B等)即可。
网络环境
用户安装软件和测试SDK都需要联网,用户使用的硬件需确保有效的网络连接。
软件环境
在选定硬件之后,需要在硬件上安装以下软件和第三方库以保证SDK正常编译和运行:
- cmake 3 +
- gcc 5.4 +
- opencv3.4 (可选)
可以使用以下方法确认cmake是否满足要求:
$ cmake --version
cmake version 3.13.3
若系统提示找不到cmake命令或者cmake version 低于3.x.x,则需要安装/升级cmake。
// apt安装cmake sudo apt update sudo apt install cmake
ubuntu官方的apt源update较慢,且可能访问不了,可以替换为国内的源:https://www.cnblogs.com/yongy1030/p/10315569.html
也可以使用源码编译的方式安装,参考安装方法。
// 升级cmake sudo apt-get install software-properties-common sudo add-apt-repository ppa:
george-edison55/cmake-3.x sudo apt-get update sudo apt-get upgrade
安装/升级cmake后可再次执行cmake --version确认版本。
可以使用以下方法确认gcc是否满足要求:
$ gcc --version
gcc (Ubuntu/Linaro 5.4.0-6ubuntu1~16.04.12) 5.4.0 20160609
若系统提示找不到gcc命令或者gcc version 低于5.4.0,则需要安装/升级gcc。
// 安装gcc sudo apt update sudo apt install build-essential // 升级gcc sudo add-apt-repository ppa:ubuntu-toolchain-r/test # 如果找不到add-apt-repository命令,
执行:apt-get install software-properties-common sudo apt-get update sudo apt-get install
-y gcc-5 g++-5 cd /usr/bin # 升级gcc 5之后,还需要替换原来的软链接 sudo rm -r gcc
# 移除之前的软连接 sudo ln -sf gcc-5 gcc # 建立gcc5的软连接 sudo rm -r g++ # 同gcc sudo ln -sf g++-5 g++
安装/升级gcc后可再次执行gcc --version确认版本。
目前没有合适的方法确认系统中是否有SDK需要的OpenCV,若用户不确定是否安装OpenCV 3.4 +,并且可以被cmake find_package到,可以手动编译安装OpenCV 3.4,也可以在之后编译SDK时自动编译OpenCV。
若选择在下一步编译EasyEdge SDK时自动编译OpenCV,则以下编译安装OpenCV的步骤可跳过。
下载OpenCV 3.4源代码包并解压:下载地址,然后编译安装:
// 编译安装OpenCV cd opencv-3.4.6 mkdir build cd build cmake .. -DBUILD_DOCS=OFF -DBUILD_EXAMPLES=OFF -DBUILD_opencv_python2=OFF -DBUILD_opencv_python3=OFF
-DBUILD_WITH_DEBUG_INFO=OFF -DBUILD_PACKAGE=OFF -DBUILD_opencv_core=ON -DBUILD_opencv_imgproc=ON
-DBUILD_opencv_imgcodecs=ON -DBUILD_opencv_highgui=ON -DBUILD_opencv_video=OFF -DBUILD_opencv_videoio=OFF
-DBUILD_opencv_dnn=OFF -DBUILD_opencv_apps=OFF -DBUILD_opencv_flann=OFF -DBUILD_opencv_gpu=OFF
-DBUILD_opencv_ml=OFF -DBUILD_opencv_legacy=OFF -DBUILD_opencv_calib3d=OFF -DBUILD_opencv_features2d=OFF
-DBUILD_opencv_java=OFF -DBUILD_opencv_objdetect=OFF -DBUILD_opencv_photo=OFF -DBUILD_opencv_nonfree=OFF
-DBUILD_opencv_ocl=OFF -DBUILD_opencv_stitching=OFF -DBUILD_opencv_superres=OFF -DBUILD_opencv_ts=OFF
-DBUILD_opencv_videostab=OFF -DBUILD_opencv_contrib=OFF -DBUILD_SHARED_LIBS=ON -DBUILD_TESTS=OFF
-DBUILD_PERF_TESTS=OFF -DBUILD_WITH_CAROTENE=OFF -DCMAKE_BUILD_TYPE:STRING=Release -DWITH_FFMPEG=OFF
-DWITH_IPP=OFF -DBUILD_PNG=ON -DBUILD_JPEG=ON -DBUILD_ZLIB=ON -DBUILD_FAT_JAVA_LIB=OFF -DOPENCV_CXX11=OFF
-DCMAKE_INSTALL_PREFIX:PATH=/usr/lib/aarch64-linux-gnu/ make
# 如果有多个cpu可以用-j加快编译速度,如4个CPU用 make -j4 make install
测试demo
SDK介绍
用户下载的Linux Arm SDK zip包中包含SDK动态库、模型等资源文件和测试demo.cpp。
需要将SDK zip包完整的放入Arm硬件上再进行解压,否则可能会报错:
libeasyedge.so: file format not recognized; treating as linker script
Linux下解压命令:tar -xvf xxx.tar
SDK zip包的目录结构如下:
EasyEdge-Linux-mxxx-bxxx-arm
├── cpp
│ ├── baidu_easyedge_linux_cpp_aarch64_ARM_gcc5.4_vx.x.x_xxxxxxx.tar # aarch64 SDK
│ ├── baidu_easyedge_linux_cpp_armv7hf_ARM_gcc5.4_vx.x.x_xxxxxxx.tar # armv7hf SDK
├── RES # 模型、标签和配置文件
若用户使用的硬件的CPU架构为aarch64,则解压baidu_easyedge_linux_cpp_aarch64_ARM_gcc5.4_vx.x.x_xxxxxxx.tar。
若CPU架构为armv7hf,则解压baidu_easyedge_linux_cpp_armv7hf_ARM_gcc5.4_vx.x.x_xxxxxxx.tar。
RK3399等开发板一般是aarch64架构,树莓派一般是armv7hf架构(最新的4B可以刷成aarch64架构)。
可通过下面的命令确认CPU架构(armv7l在树莓派上实际是指armv7hf):
$ uname -m
aarch64 # 或者是armv7l
解压完对应的tar包之后的目录结构如下:
baidu_easyedge_linux_cpp_aarch64_ARM_gcc5.4_vx.x.x_xxxxxxx
├── demo # 测试demo
│ ├── CMakeLists.txt
│ ├── demo.cpp
│ ├── opencv.cmake
│ └── easyedge_serving
├── include # SDK需要的头文件
│ ├── easyedge
│ │ ├── easyedge_config.h
│ │ └── easyedge.h
├── lib # SDK需要的库文件
│ ├── libeasyedge.so -> libeasyedge.so.x.x.x
│ ├── libeasyedge.so.x.x.x
│ ├── libeasyedge_static.a
│ ├── libpaddle_full_api_shared.so
│ └── libverify.so
└── ReadMe.txt # 文档等其他说明
编译demo
前面安装了cmake、gcc等工具之后,可以编译SDK demo,生成测试的可执行文件。步骤如下。
一、将获取的序列号填入demo.cpp
$ cd demo # 进入demo文件夹 $ vi demo.cpp # 若vi未找到命令,执行 sudo apt install vim
在打开的代码编辑页面,找到
global_controller()->set_licence_key("set your license here");
将序列号填入引号内。如果想打印demo运行过程中的日志,找到
log_config.enable_debug = false;
将false改为true即可。
二、编译 在demo目录下执行
mkdir build # 创建build目录 cd build
cmake .. # 如果系统中安装了opencv3.4以上 # 或者 cmake .. -DEDGE_BUILD_OPENCV=ON # 自动编译安装opencv
若用户需要自定义opencv library path、gcc路径等,修改CMakeList.txt即可。
当出现:
-- Configuring done -- Generating done -- Build files have been written to: /xxx/demo/build
表示cmake成功。然后执行编译
make # 如果有多个cpu可以用-j加快编译速度,如4个CPU用 make -j4
当出现:
[100%] Built target easyedge_serving [100%] Built target easyedge_demo
表示编译成功,在build目录下出现编译的产物:
- easyedge_demo :测试的可执行文件
- easyedge_serving:包含http server的测试的可执行文件
- thirdparty :编译安装的opencv
测试easyedge_demo
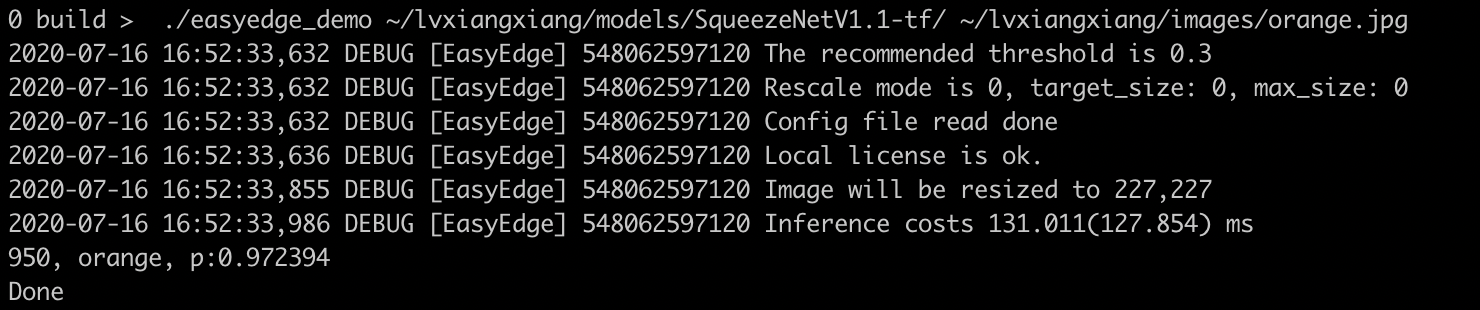
在build目录下执行:
./easyedge_demo {模型RES文件夹} {测试图片路径}
第一个参数为包含模型的文件夹路径,第二个参数为测试的图片的路径。SDK中已经包含模型文件夹,如果用户有其他模型文件,可以指定为其路径。如:
./easyedge_demo ../../../RES /xxx/test.jpg
然后可以看到输出的结果: 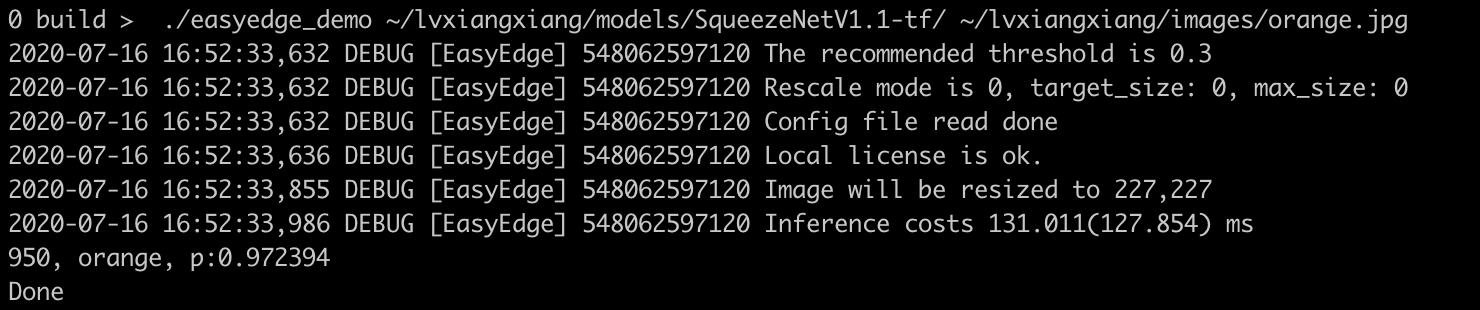 如果是物体检测或者图像分割模型,可以打开生成的/xxx/test.result.cpp.jpg图片,查看检测框的效果。
如果是物体检测或者图像分割模型,可以打开生成的/xxx/test.result.cpp.jpg图片,查看检测框的效果。
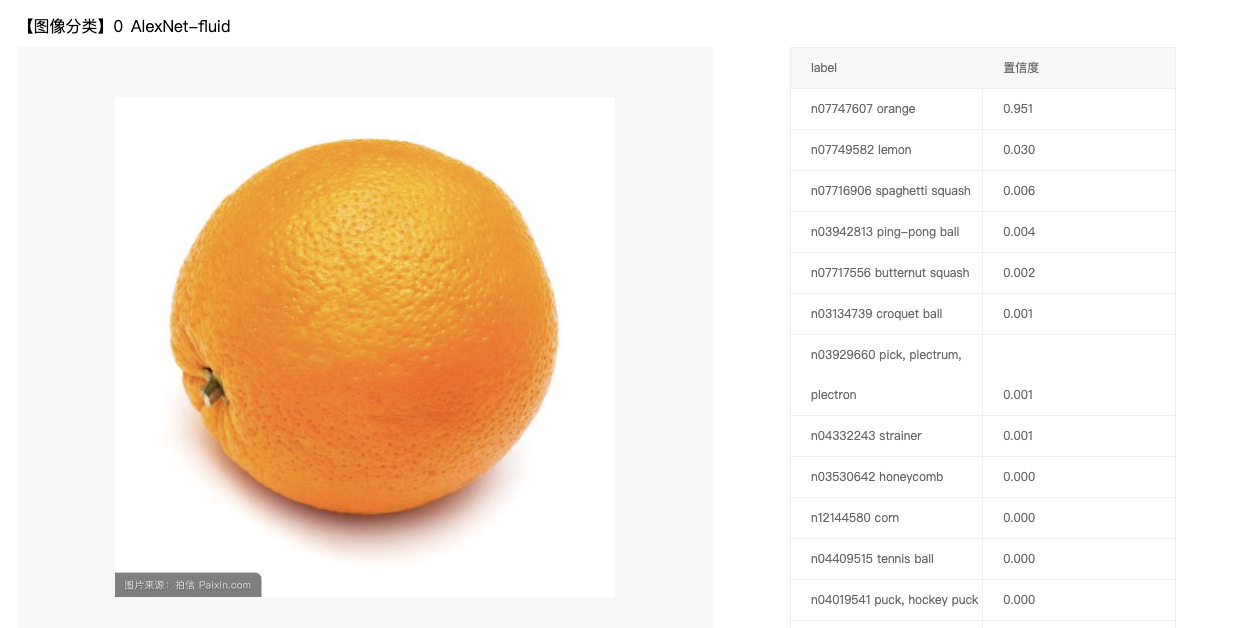
测试easyedge_serving
easyedge_serving会开启一个http server服务,并实现了一个简单的网页,用户可以在网页上上传图片并查看预测结果。
在build目录下执行:
./easyedge_serving {模型RES文件夹} {序列号} {主机ip, 默认 0.0.0.0} {端口, 默认 24401}
如:
./easyedge_serving ../../../RES "1111-1111-1111-1111" 0.0.0.0 24401
若日志显示:
HTTP is now serving at 0.0.0.0:24401
表示http server启动成功。此时可以打开浏览器,输入网址http://{设备ip}:24401,上传图片来进行测试。
查看设备ip的方法:
ifconfig # 如果没有ifconfig命令,执行 sudo apt install net-tools
如果是有线连接,找到eth0一栏,如果是wifi连接,找到wlan0一栏。
注意:只有本机电脑和硬件设备的网络ip在同一网段之下,才可以通过网址访问。
效果如下: 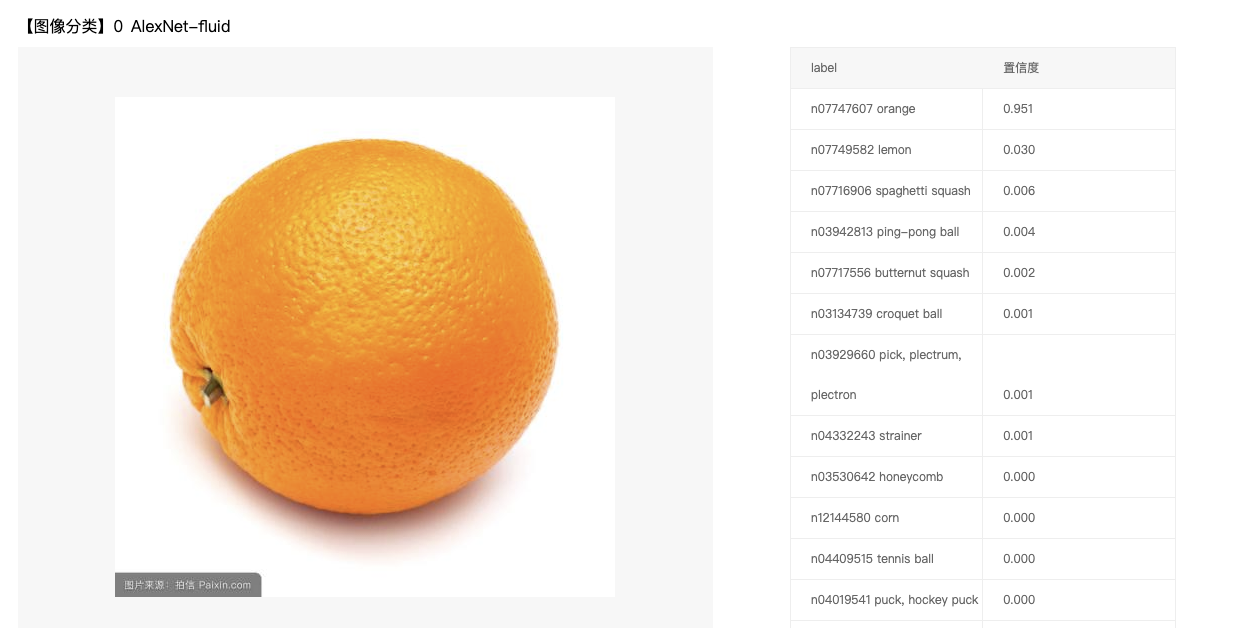
集成SDK
SDK提供了一系列模型加载、预测等接口,用户可以方便的集成进自己的程序之中。
接口说明、数据格式说明以及常见错误请参考SDK技术文档。
建议先测试Demo,以及参考demo.cpp和demo的CMakeLists.txt调用流程。如果遇到错误,优先参考文件中的注释以及日志说明。
一、导入SDK头文件和库文件
在baidu_easyedge_linux_cpp_aarch64_ARM_gcc5.4_vx.x.x_xxxxxxx/include下有SDK的头文件。 在baidu_easyedge_linux_cpp_aarch64_ARM_gcc5.4_vx.x.x_xxxxxxx/lib下有SDK的库文件,包含动态库libeasyedge.so和静态库libeasyedge_static.a。用户可选择合适的导入方式。
用户将头文件和库文件拷贝至自己的项目中,并在自己的CMakeLists.txt中引用:
find_package(OpenCV REQUIRED) // 导入头文件 include_directories( ${OpenCV_INCLUDE_DIRS} ${CMAKE_SOURCE_DIR}/../include/ )
// 导入库文件 link_directories( ${CMAKE_SOURCE_DIR}/../lib/ ) // 链接库文件
target_link_libraries({your_executable_file} ${OpenCV_LIBS} easyedge paddle_full_api_shared)
二、在程序中调用SDK接口
// 引入SDK头文件 #include "easyedge/easyedge.h" // step 0: 设置序列号 global_controller()
->set_licence_key("set your license here"); // step 1: 配置模型资源目录 PaddleFluidConfig config;
config.model_dir = {模型文件目录}; // step 2: 创建并初始化Predictor auto predictor
= global_controller()->CreateEdgePredictor(config); auto img = cv::imread({测试图片路径})
; // step 3: 预测图像 std::vector<EdgeResultData> result; predictor->infer(img, result);
如果是口罩检测模型,将PaddleFluidConfig config修改为PaddleMultiStageConfig config。 口罩检测模型请注意输入图片中人脸大小建议保持在 88到9696像素之间,可根据场景远近程度缩放图片后再传入SDK。
