文档简介:



本章将使用已经开源的 ssd_mobilenet_v1_coco_2017_11_17 模型完整演示边缘视频AI的DEMO。
一、前提准备
- 有一个边缘节点设备,本文使用的是宸曜 POC-351VTC,安装ubuntu-18.04-desktop-amd64。
- 有一个英特尔(Intel) 神经计算棒 Movidius 二代。
- 有一个摄像头,可以是USB摄像头,也可以是网络摄像头,本实验使用后者,通过边缘节点的PoE口给网络摄像头供电。
- 有一个物体识别模型,本实验用的是 ssd_mobilenet_v1_coco_2017_11_17,该模型支检测90种物体,具体清单请参考:mscoco_label_map。
- 边缘节点已经按照快速入门教程连接到云端。
二、搭建边缘硬件环境
搭建边缘硬件环境,如下图所示

搭建步骤如下
- 给边缘节点硬件供电
- 网络摄像头连接到PoE口
- 无线网卡和Movidius随便插一个USB口
整体环境信息如下
-
边缘节点
- 无线网卡IP:172.30.196.93
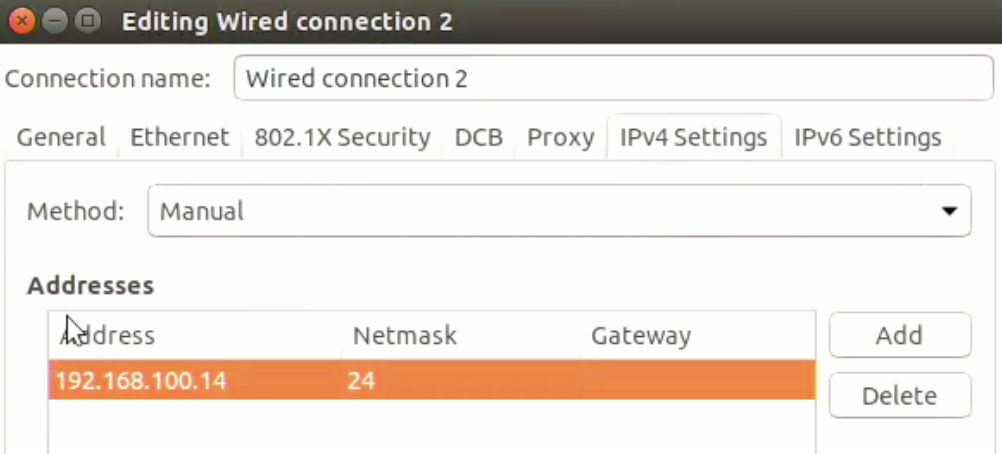
- 与网络摄像头连接的IP:192.168.100.14,需要设置边缘盒子PoE网口的IP地址。
-
网络摄像头IP
- 网络摄像头IP:192.168.100.10,出厂默认IP地址
-
RTSP流地址:rtsp://b:a1234567@192.168.100.10:554/Streaming/channels/1/,后续会用到。
RTSP协议地址通用格式为 rtsp://:@:/ ,各参数解释如下
- :摄像头登录用户名 ,一般可以在摄像头底座当中找到
- :摄像头登录密码,一般可以在摄像头底座当中找到
- :路由器/交换机分配给摄像头的IP地址
- : RTSP 协议的端口号,一般默认为 554,
- :摄像头信道
三、模拟场景
- 摄像头连接边缘盒子,实时探测视野范围内的物体
- 当检测到目标物体以后,保存抽帧图像,并同步发送一条消息到边缘broker服务。如果没有检测到目标物体,丢弃抽帧图像。
- 支持检测多目标物体,本场景实验检测的物体包括:剪刀、笔记本电脑、书本、键盘和人。
四、边缘应用描述
除了边缘节点连接云端是自动部署的系统应用,还需要在边缘节点上部署以下三个应用
| 序号 | 应用名 | 用途 |
|---|---|---|
| 1 | vi-function | 模型推断结果后处理函数,将模型推断结果解析成可识别数据 |
| 2 | video-infer | 模型推断应用,负责加载AI模型并执行AI推断 |
| 3 | remote-object | 将边缘推断图片上传到云端对象存储 |
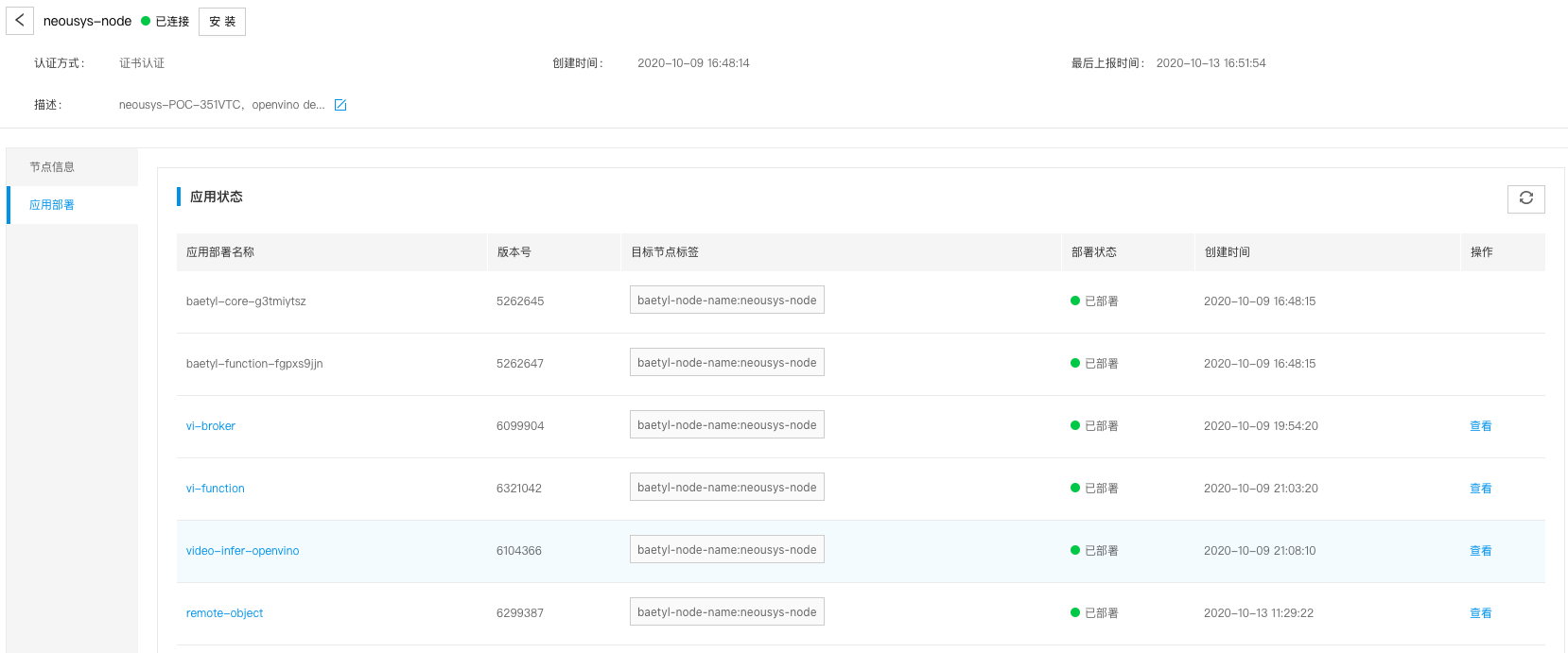
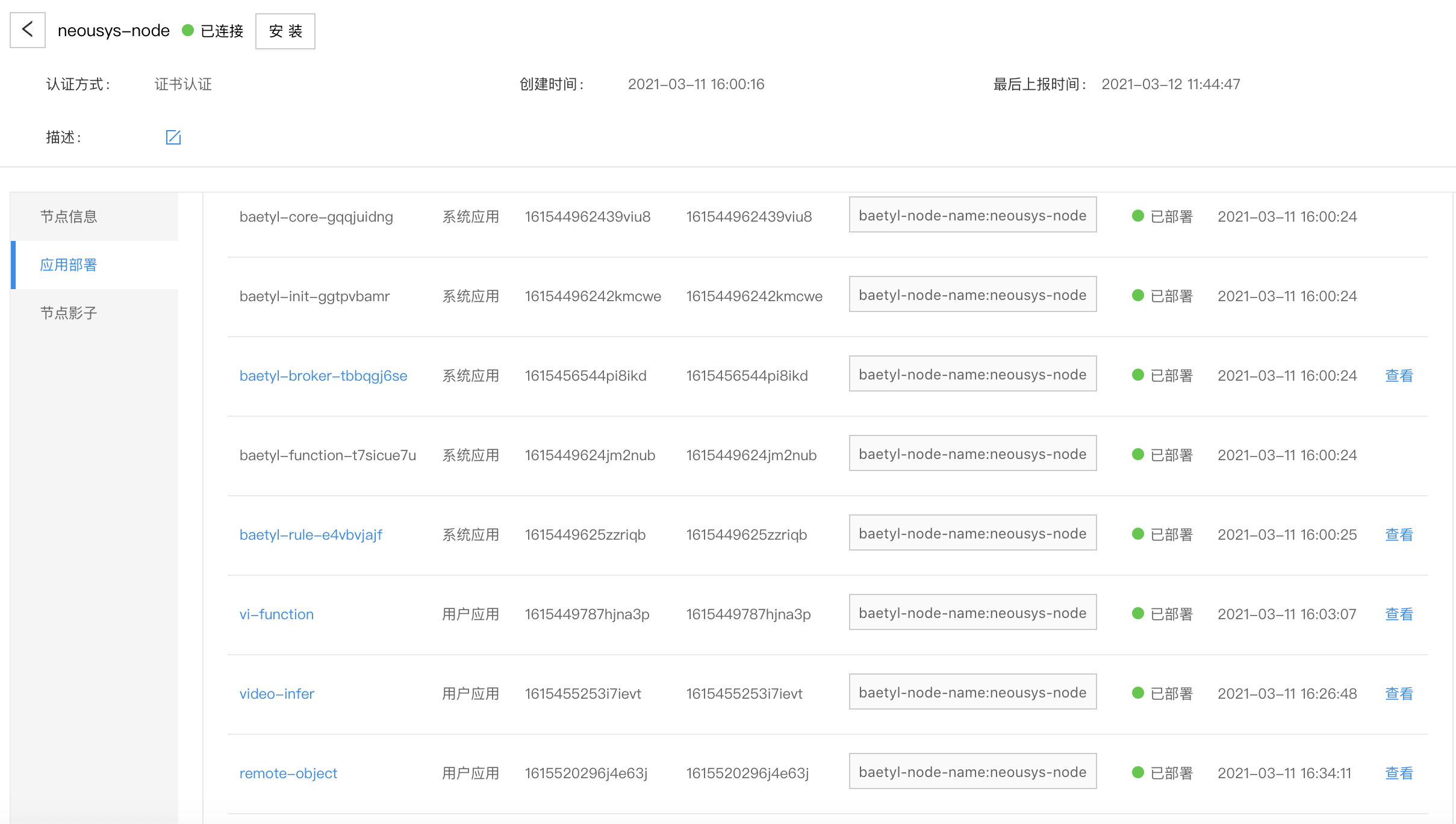
最终边缘节点上将会有6个边缘应用,如下图所示
五、边缘应用关系
各模块之间的调用关系如下图所示
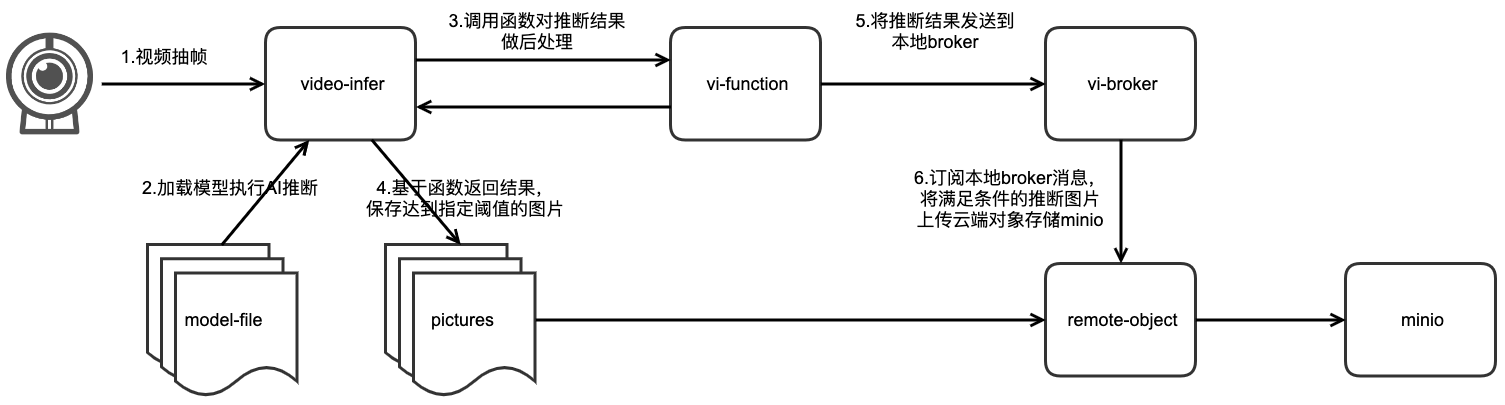
整个视频推断流程如下
- 视频抽帧
- 加载模型执行AI推断
- 调用函数对推断结果做后处理
- 基于函数返回结果,保存达到指定阈值的图片
- 将推断结果发送到
- 订阅本地broker消息,将满足条件的推断图片上传云端对象存储minio
六、边缘应用配置
vi-function配置
- 创建函数配置项:vi-function-code,如下图所示:

- 标签:baetyl-function: python3-opencv
- 配置数据变量名:analyse.py,此变量名analyse后续会作为函数入口
- 配置数据变量值为python代码,代码如下:
#!/usr/bin/env python # -*- coding:utf-8 -*- """ function to analyse video infer result in python """ import time import numpy as np location = "var/lib/baetyl/image/{}.jpg" classes = { 1: 'person',73: 'laptop',76: 'keyboard',77:
'cell phone',84: 'book',87: 'scissors' } def handler(event, context): """ function handler """ data = np.fromstring(event, np.float32) mat = np.reshape(data, (-1, 7)) objects =
[] scores = {} for obj in mat: # print("obj:", obj) clazz = int(obj[1]) if clazz in classes:
score = float(obj[2]) if classes[clazz] not in scores or scores[classes[clazz]] < score:
scores[classes[clazz]] = score if score < 0.6: continue objects.append({ 'class': classes[clazz],
'score': score, 'left': float(obj[3]), 'top': float(obj[4]), 'right': float(obj[5]), 'bottom':
float(obj[6]) }) res = {} res["imageDiscard"] = len(objects) == 0 res["imageObjects"] = objects res["imageScores"] = scores path = location.format(time.time()) if len(objects) != 0: res["imageLocation"] = path res["publishTopic"] = "video/infer/result" res["type"] = "UPLOAD" content = {} content["localPath"] = path content["remotePath"] = path res["content"] = content return res
- 创建函数应用:vi-function,添加函数服务:vi-function-service,如下图所示:
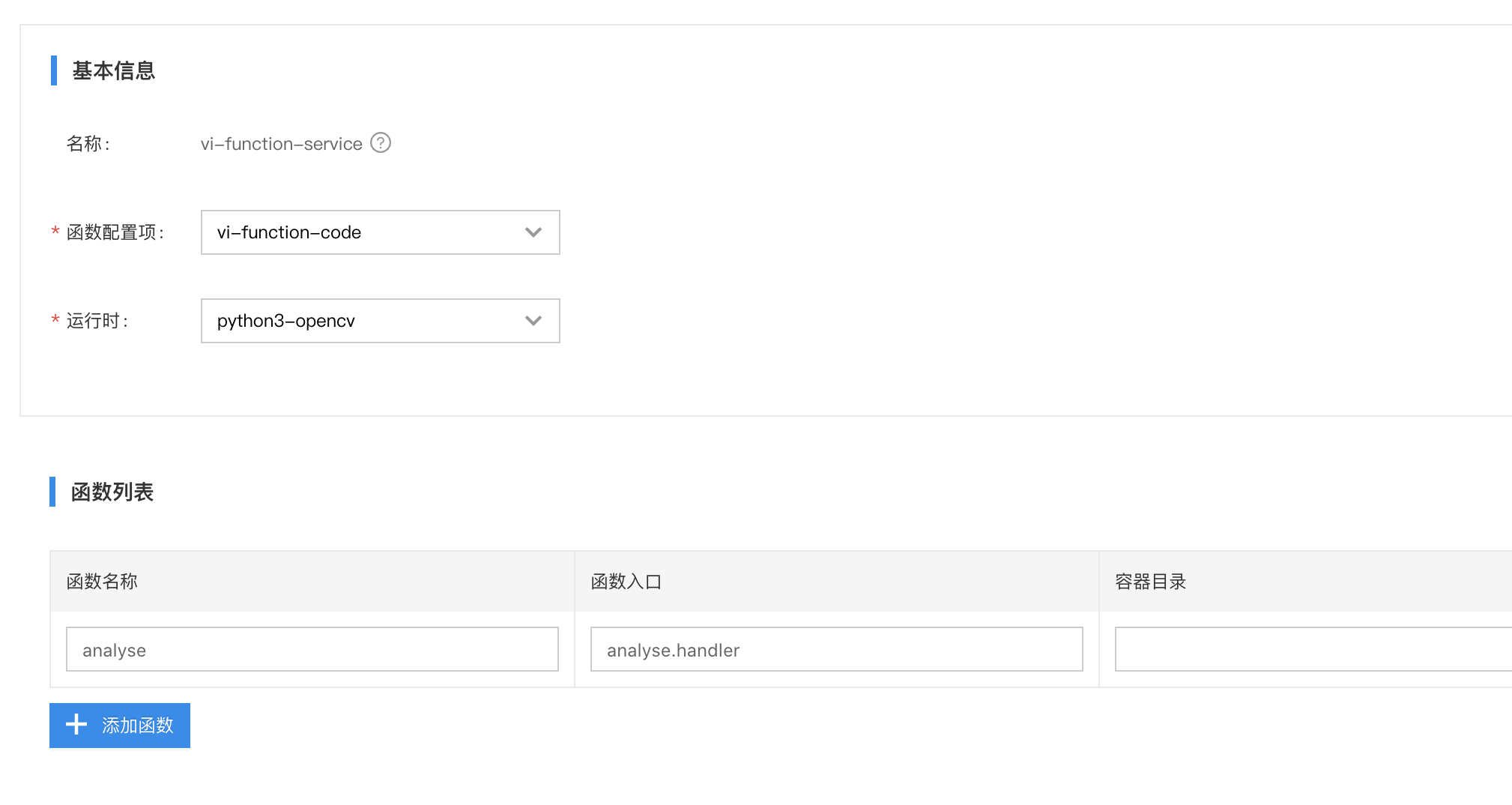
- 服务名称:vi-function-service
- 服务类型:函数服务,非容器服务
- 函数配置项:使用之前创建的配置项:vi-function-conf
- 运行时:python3-opencv
- 函数入口:analyse.handler。函数入口表示执行函数,对于Python/Node运行时来说,由函数脚本和处理函数名组成。
函数的完整路径是 [服务名称/函数入口] ,则上述 analyse 这个python函数的完整调用路径就是:vi-function-service/analyse。
video-infer配置
- 创建配置项:video-infer-conf,如下图所示:

- 创建配置数据,变量名为:conf.yml,变量如下:
video: uri: 'rtsp://b:a1234567@192.168.100.10:554/Streaming/channels/1/' limit: fps: 1 process:
before: swaprb: true width: 300 hight: 300 infer: model: var/lib/baetyl/model/frozen_inference
_graph.pb config: var/lib/baetyl/model/ssd_mobilenet_v1_coco_2017_11_17.pbtxt backend: openvino
device: vpu after: function: name: vi-function-service/analyse logger: path:
var/lib/baetyl/app-log/video-infer.log level: debug
- 通过 backend: openvino 和 device: vpu 这两个配置项,实现让video-infer这个应用使用Movidius加速棒的vpu算力来执行边缘推断计算。如果没有这两个配置项,则默认使用CPU推断。
- video-infer执行AI推断以后会调用分析函数 vi-function-service/analyse
- 分析函数返回的消息会发布到本地MQTT Broker tcp://baetyl-broker:1883
- 创建配置项:video-infer-model,如下图所示
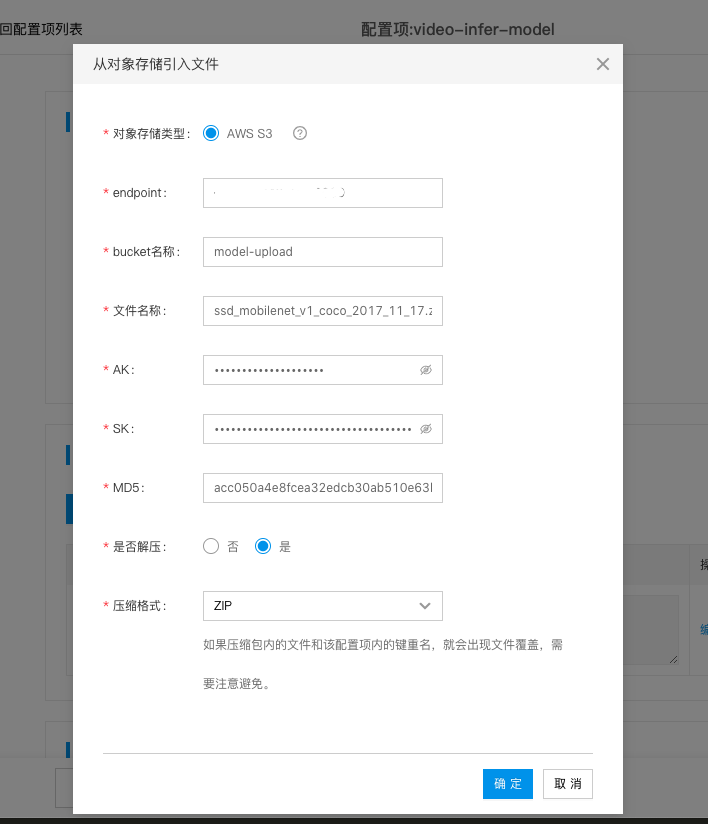
- endpoint:对象存储访问地址
- bucket名称:在对象存储当中创建的bucket名称,此处为model-upload
- 文件名称:模型文件在对象存储当中的文件名,如果在在目录当中,则这里需要填写目录名称+文件名称,此处为:ssd_mobilenet_v1_coco_2017_11_17.zip
- AK/SK:对象存储访问凭证
- MD5:模型文件ssd_mobilenet_v1_coco_2017_11_17.zip的MD5值为:acc050a4e8fcea32edcb30ab510e63b7。边缘节点在下载完ssd_mobilenet_v1_coco_2017_11_17.zip模型文件以后,会对模型文件执行MD5校验,以验证下载文件的完整性。
- 是否解压:选择 是 ,解压格式为ZIP。边缘节点下载模型文件ssd_mobilenet_v1_coco_2017_11_17.zip以后,会负责将其解压。在本案例当中,ssd_mobilenet_v1_coco_2017_11_17.zip解压以后会得到frozen_inference_graph.pb和ssd_mobilenet_v1_coco_2017_11_17.pbtxt这里两个模型文件。
- 创建应用:video-infer,添加容器服务:video-infer-openvino,如下图所示:
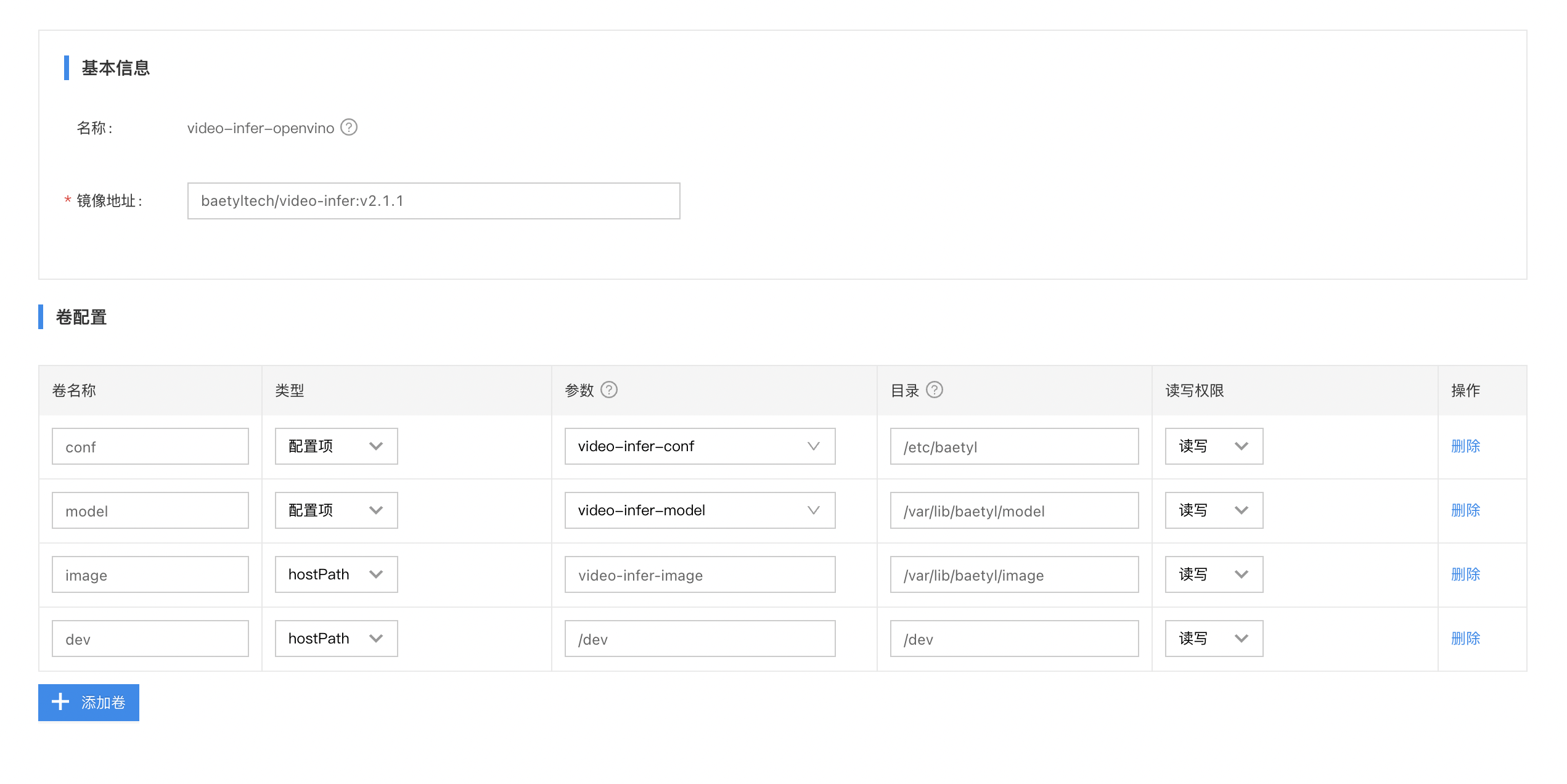

- 服务名:video-infer-openvino
- 镜像:baetyltech/video-infer:v2.1.1
-
卷配置:
- conf:添加 video-infer-conf 配置项,作为模块配置。
- model:添加 video-infer-model 配置项,边缘节点会自动下载ssd_mobilenet_v1_
- coco_2017_11_17模型文件并解压至/var/lib/baetyl/model目录,然后video-infer应用会从此处加载模型文件frozen_inference_graph.pb和ssd_mobilenet_v1_coco_2017_11_17.pbtxt。
- image:将AI推断保存的图片从容器内目录/var/lib/baetyl/image映射到宿主机目录。此处参数填写的是video-infer-image,对应宿主机目录/var/lib/baetyl/app-data/video-infer-image。
- dev:Movidius USB插入到边缘盒子以后,会在宿主机/dev目录下多出一个设备,将宿主机的/dev目录映射到容器内的/dev目录下。
-
特权选项:
- 启用特权模式:是。
remote-object配置
- 创配配置项:remote-mino-conf,如下图所示:
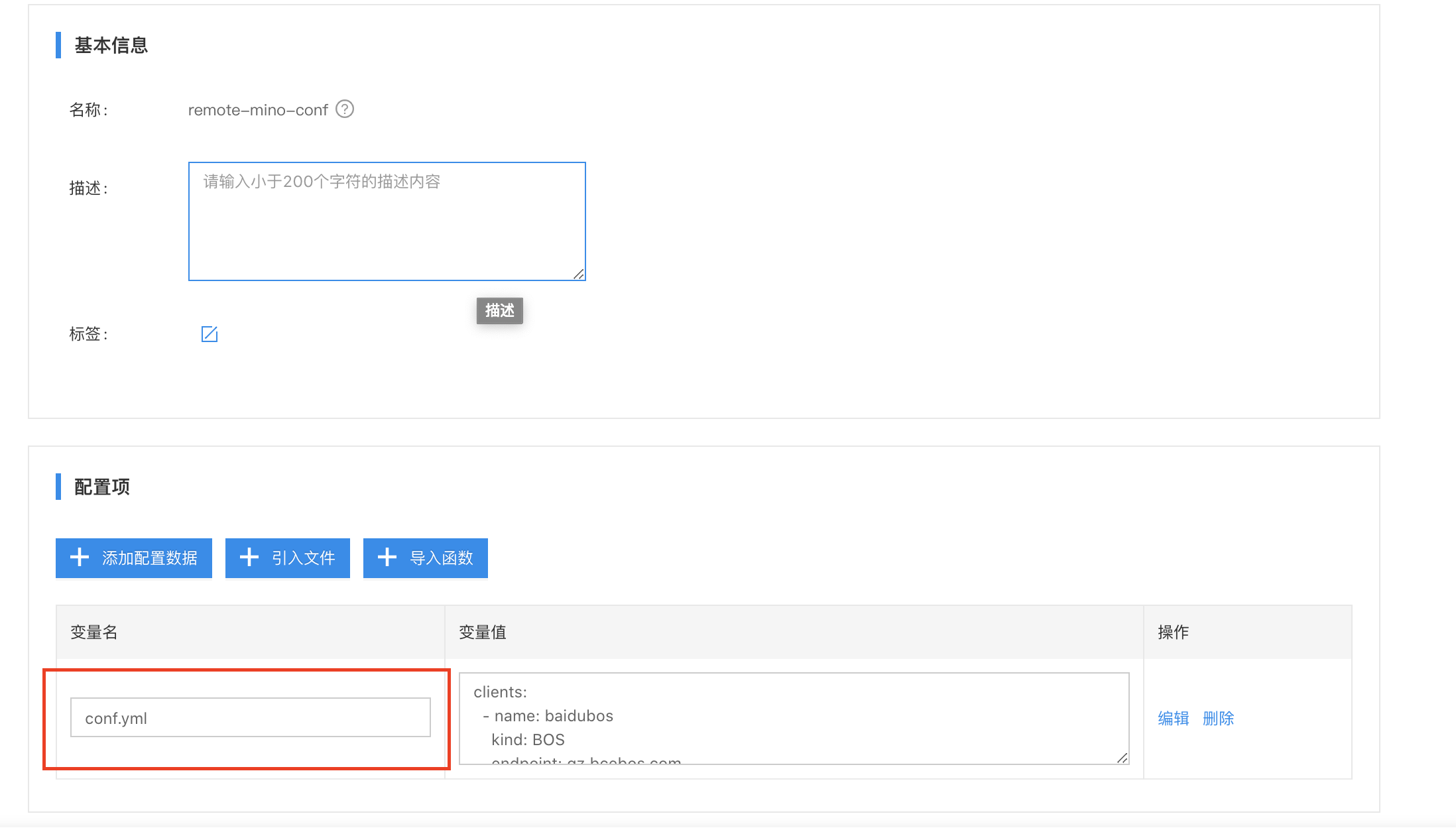
添加配置数据变量名为:conf.yml,对应的变量值如下所示:
clients:
- name: minio
kind: S3
endpoint: 'http://ip:port' # 替换为自己的对象存储地址
ak: minioadmin
sk: minioadmin
timeout: 10m
pool:
worker: 100
idletime: 30s
bucket: image-upload
rules:
- name: remote-minio-1
source:
topic: video/infer/result
qos: 1
target:
client: minio
logger:
path: var/lib/baetyl/app-log/minio.log
level: debug
- 创建应用:remote-object,然后添加容器服务:remote-object,如下图所示:
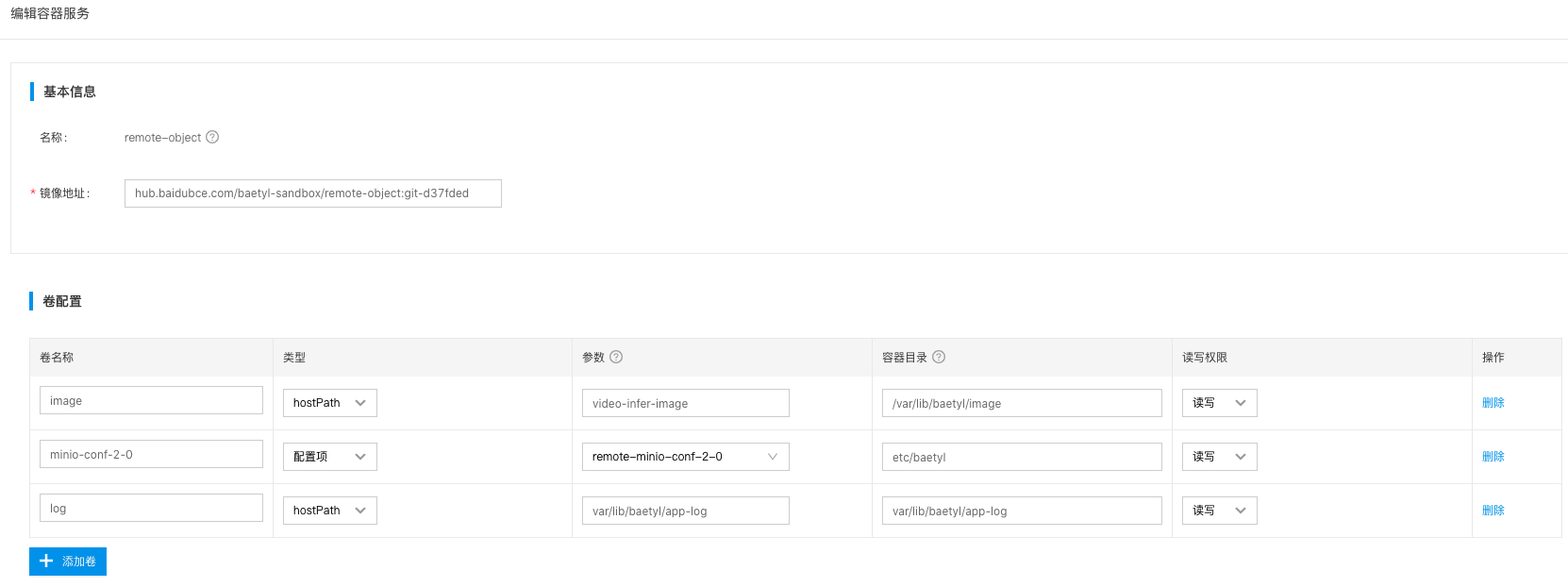
- 服务名称:remote-object
- 镜像地址:docker.io/baetyltech/remote-object:v2.1.0
-
卷配置
- minio-conf:挂载remote-object服务的配置项
- image:将宿主机当中的推断图片映射至容器内目录,这样remote-object服务才能拿到图片将其上传至minio对象存储当中。
- log:如果需要将模块的日志文件映射到宿主机,需要配置此项。
七、验证边缘AI检测结果
step1:应用部署至边缘节点
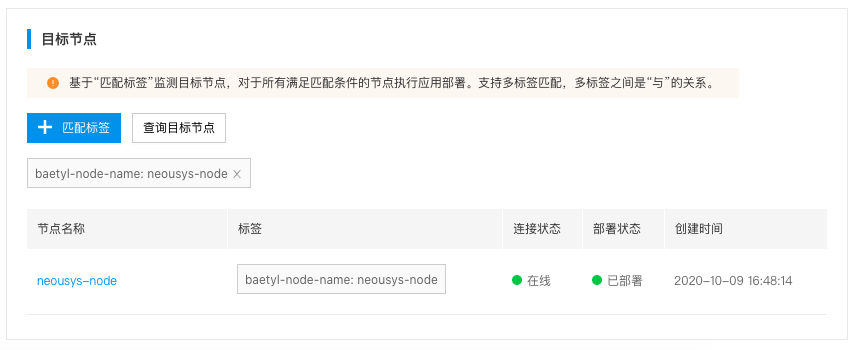
- 将上述应用全部部署至边缘节点,如下图所示:
- 检查边缘节点上的应用部署情况,如下图所示:
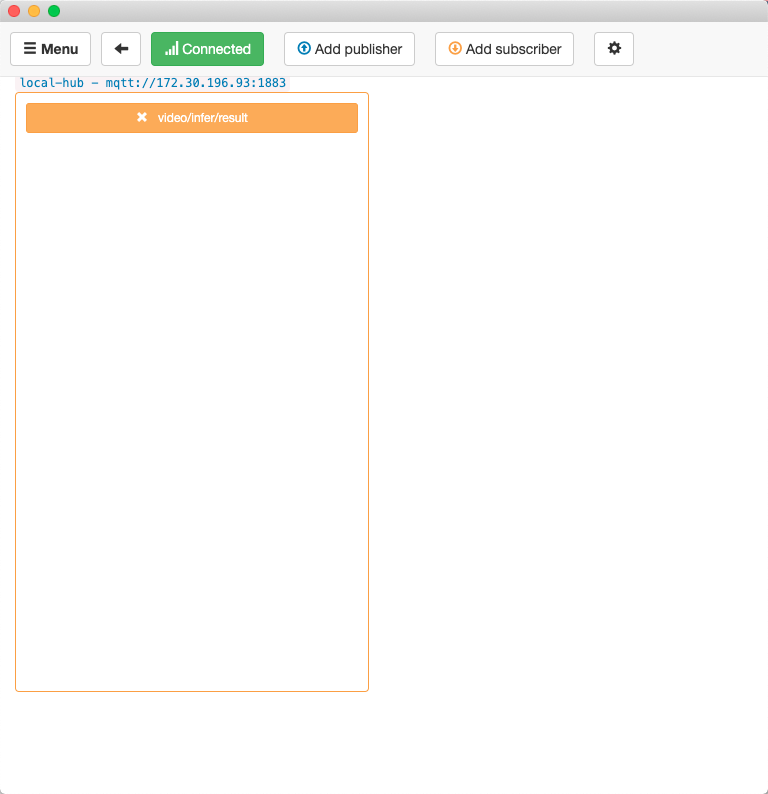
step2:使用MQTT Box订阅边缘节点本地broker服务
在模拟场景当中提到“当检测到目标物体以后,保存抽帧图像,并同步发送一条消息到边缘broker服务”,为了监测发送到broker服务的消息,我们使用MQTT Box工具提前订阅 video/infer/result 这个topic的消息,如下图所示:
step3:使用摄像头检测物体
- 手持摄像头,旋转一周,让摄像头能够扫描到办公桌上的剪刀、笔记本电脑、书本、键盘,以及坐在工位上的人。
- 实时查看订阅了hub模块的MQTT Box的消息界面,每检测到一个目标物体,MQTT Box就能订阅到一条消息。
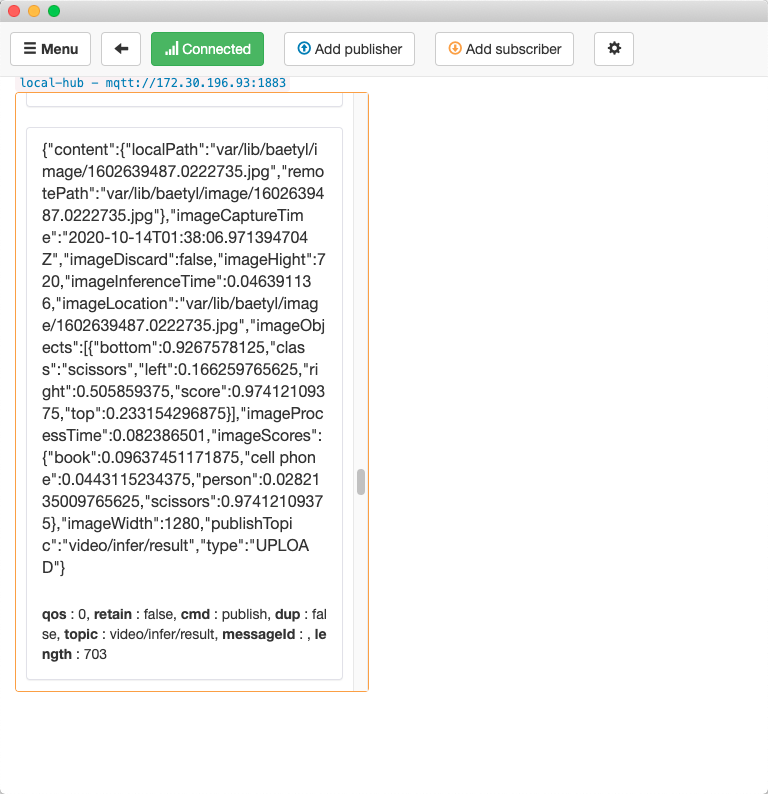
- 将MQTTBox订阅的消息进行Json格式化,得到如下结果:
{ "content":{ "localPath":"var/lib/baetyl/image/1602639487.0222735.jpg", "remotePath":"
var/lib/baetyl/image/1602639487.0222735.jpg" }, "imageCaptureTime":"2020-10-14T01:38:0
6.971394704Z", "imageDiscard":false, "imageHight":720, "imageInferenceTime":0.046391136, "
imageLocation":"var/lib/baetyl/image/1602639487.0222735.jpg", "imageObjects":[ { "bottom":
0.9267578125, "class":"scissors", "left":0.166259765625, "right":0.505859375, "score":0.
97412109375, "top":0.233154296875 } ], "imageProcessTime":0.082386501, "imageScores":{
"book":0.09637451171875, "cell phone":0.0443115234375, "person":0.0282135009765625, "scissors
":0.97412109375 }, "imageWidth":1280, "publishTopic":"video/infer/result", "type":"UPLOAD" }
通过上述消息,可以得出如下结论
- 检测到物体是剪刀:"class": "scissors"
- AI推断为剪刀的得分是0.974:"scissors": 0.974121093751
- 图片已保存:"imageLocation": "var/lib/baetyl/image/1602639487.0222735.jpg",对应宿主机目录:/var/lib/baetyl/app-data/video-infer-image/1602639487.0222735.jpg
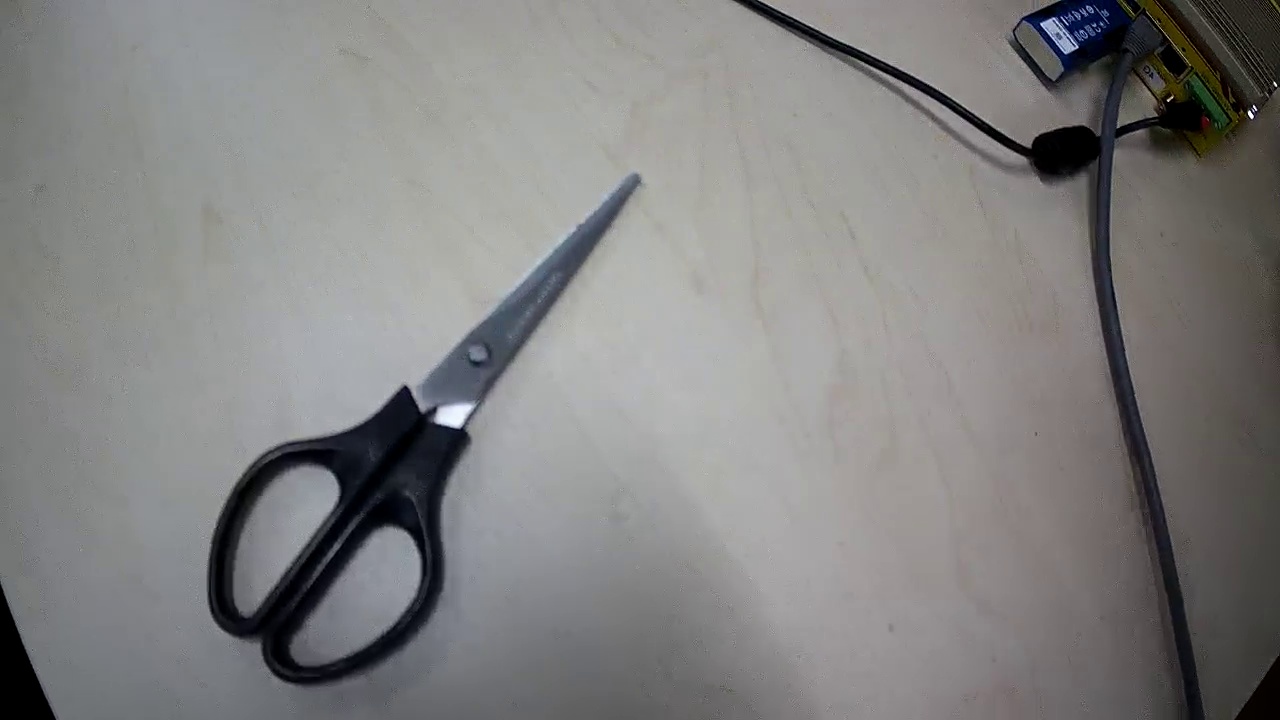
step4:验证被保存的图片当中的对象
- SSH登录到边缘节点,查看已经保存了多张抽帧图片,如下图所示:

- 将 1602639487.0222735.jpg 下载到本地电脑,确认该图片当中物体是剪刀,与MQTT Box接收到消息一致,如下图所示:
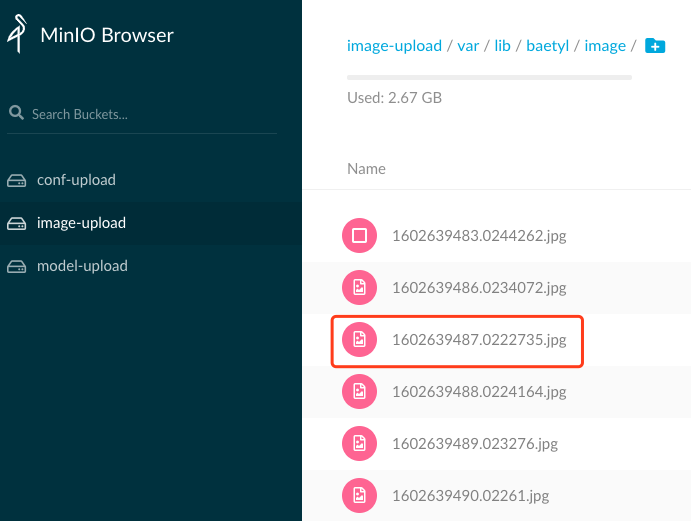
step5:验证推断结果图片上传至云端对象存储
打开minio控制台,进入到选择image-upload这个bucket,然后进度到目录var/lib/baetyl/image,我们可以看到从边缘节点上传的图片,如下图所示: